

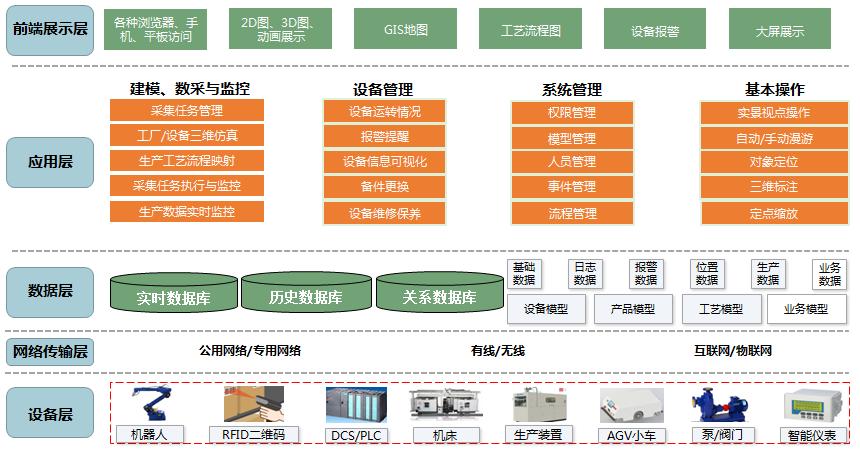
通過(guò)力控?cái)?shù)字孿生工廠解決方案可實(shí)現(xiàn)以下目標(biāo):
● 采集感知與反饋控制。數(shù)字孿生閉環(huán)優(yōu)化的起始和終止分別是采集感知與反饋控制,。通過(guò)深層次的采集感知,獲取物理對(duì)象全方位數(shù)據(jù),;利用高質(zhì)量反饋控制,完成物理對(duì)象最終執(zhí)行,。
● 互聯(lián)、互通、互操作,。方案具備數(shù)據(jù)互聯(lián),、信息互通功能,實(shí)現(xiàn)數(shù)據(jù),、信息,、模型實(shí)時(shí)融合。其中,,數(shù)據(jù)互聯(lián)實(shí)現(xiàn)物理對(duì)象市場(chǎng)數(shù)據(jù),、研發(fā)數(shù)據(jù)、生產(chǎn)數(shù)據(jù),、運(yùn)營(yíng)數(shù)據(jù)等全生命周期數(shù)據(jù)集成,;信息互通利用數(shù)據(jù)字典等功能,構(gòu)建信息模型,,實(shí)現(xiàn)物理對(duì)象信息統(tǒng)一描述,。
● 三維可視化。通過(guò)構(gòu)建物理實(shí)體三維幾何模型,,為各個(gè)場(chǎng)景如園區(qū),、建筑物、生產(chǎn)車(chē)間,、生產(chǎn)設(shè)備,、監(jiān)控設(shè)備等幾何模型添加信息屬性,并與相應(yīng)位置IOT數(shù)據(jù)結(jié)合,,實(shí)現(xiàn)云端三維可視化,。
● 模擬仿真。通過(guò)仿真軟件中模型狀態(tài)的實(shí)時(shí)更新,,使模擬數(shù)據(jù)同真實(shí)設(shè)備狀態(tài)保持一致,,實(shí)現(xiàn)車(chē)間設(shè)備真實(shí)運(yùn)行情況的實(shí)時(shí)同步監(jiān)控。
 基本操作
基本操作構(gòu)建三維數(shù)字孿生工廠三維場(chǎng)景,,并基于三維場(chǎng)景,,實(shí)現(xiàn)實(shí)景視點(diǎn)操作、指定路線漫游,、對(duì)象定位,、平移和旋轉(zhuǎn)等功能。
 流程信息可視化
流程信息可視化自動(dòng)讀取生產(chǎn)現(xiàn)場(chǎng)實(shí)時(shí)回傳的運(yùn)行數(shù)據(jù),,并實(shí)時(shí)顯示在三維場(chǎng)景中的設(shè)備,、工位、傳感器上方,。實(shí)現(xiàn)動(dòng)態(tài)孿生模型真實(shí)再現(xiàn)工藝裝置的能量,、質(zhì)量平衡,、操作條件等流程信息。
 資產(chǎn)可視化
資產(chǎn)可視化實(shí)現(xiàn)所有獨(dú)立設(shè)備和聯(lián)體設(shè)備的三維建模,,可以快速搜索,、定位目標(biāo)設(shè)備,從而查看設(shè)備的安裝應(yīng)用信息,、歸屬信息等,。
 設(shè)備管理
設(shè)備管理系統(tǒng)能夠?qū)崟r(shí)獲取并顯示設(shè)備故障報(bào)警信息。通過(guò)報(bào)警提示,,可自動(dòng)定位到具體設(shè)備,,并在報(bào)警設(shè)備處顯示醒目的報(bào)警標(biāo)簽。同時(shí),,可快速查看設(shè)備報(bào)警的詳細(xì)信息及故障情況,。
 仿真虛擬操作培訓(xùn)
仿真虛擬操作培訓(xùn)由于流程行業(yè)生產(chǎn)連續(xù)、設(shè)備不能停機(jī),、安全生產(chǎn)要求等特點(diǎn),,導(dǎo)致無(wú)法為新入職的設(shè)備管理、工廠檢修等技術(shù)工程師提供實(shí)操訓(xùn)練環(huán)境,?;跀?shù)字孿生的仿真培訓(xùn),為現(xiàn)場(chǎng)工程師提供模擬操作環(huán)境,,能夠快速幫助工程師提升技術(shù)技能,,為其真正開(kāi)展實(shí)際運(yùn)維工作提供基礎(chǔ)訓(xùn)練。

力控科技數(shù)字孿生解決方案,,以數(shù)字化的形式在虛擬空間中構(gòu)建了與物理世界一致的高保真模型,,通過(guò)與物理世界間不間斷的閉環(huán)信息交互反饋與數(shù)據(jù)融合,能夠監(jiān)控物理世界的變化,、反映物理世界的運(yùn)行狀況,、評(píng)估物理世界的狀態(tài)、診斷發(fā)生的問(wèn)題,,最終優(yōu)化和改變物理世界,。
數(shù)字孿生能夠突破許多物理?xiàng)l件的限制,通過(guò)數(shù)據(jù)和模型雙驅(qū)動(dòng)的仿真,、監(jiān)控,、優(yōu)化和控制,實(shí)現(xiàn)服務(wù)持續(xù)創(chuàng)新,、需求即時(shí)響應(yīng)和產(chǎn)業(yè)升級(jí)優(yōu)化,。基于模型,、數(shù)據(jù)和服務(wù)等各方面的優(yōu)勢(shì),,數(shù)字孿生正在成為企業(yè)提高質(zhì)量,、增加效率、降低成本,、減少損失,、保障安全,、節(jié)能減排的關(guān)鍵技術(shù),。
ForceCon+工業(yè)軟件賦能數(shù)字工業(yè)

訂閱號(hào)

力控小程序

 京公網(wǎng)安備11010802042889號(hào)
京公網(wǎng)安備11010802042889號(hào)